Color Color
Abstract- We present a novel system to use networked acoustic modems for real-time wireless delivery of oceanographic measurements from a distributed array of subsurface instruments in coastal waters. The network consists of sensor nodes, repeater nodes, gateway nodes, and a server. Gateway nodes are buoys equipped with acoustic modems interfaced to internet-accessible cellular modems for two-way communication between server and subsurface network. Network data flow is remotely re-configurable with multiple paths to the server from each sensor so loss or failure of an individual node can be accommodated. Oceanographic instruments are housed in bottom-mounted frames to limit biofouling and minimize fishing and shipping interference. A trawl-resistant frame enables azimuthally omnidirectional acoustic signaling as required for the network. Gateways serve multiple sensors distributed across wide areas, minimizing the number of instruments with surface exposure. A low-bandwidth data format for acoustic Doppler current profilers is devised to reduce network throughput and power consumption. Gateway equipment is engineered for a Coast Guard buoy. Tests in winter and spring indicate wind limits acoustic communications range by roughening the sea surface. A preliminary network deployment demonstrates gateway control, data delivery across multiple repeaters, and route reconfiguration.
I. Introduction
Many sectors of society are increasingly recognizing the importance of technologies to collect and distribute data from the coastal ocean in real time. Academic researchers, the military, resource managers, and marine safety and commercial operators are fueling an expansion of efforts in this area. In addition to advances in basic scientific understanding, examples of applications for real-time measurements include improved management of accidents involving hazardous materials and more effective environmental monitoring. Measurement of ocean surface properties in real time has progressed substantially in recent years. Satellite observations are routinely used to map surface temperatures and optical properties, and surface currents can be remotely sensed from shore and mapped in real time using high-frequency radar.
A major remaining challenge is collection of subsurface data from multiple distributed instruments in real time. Subsurface measurements resolving vertical structure are critical to understand many coastal processes. For example, a thin surface layer of buoyant flow with dynamics uncoupled from deeper flow often occurs across coastal areas influenced by estuarine outflows. Surface measurements will shed no light on the majority of the water column beneath this shallow layer. Sampling desired from subsurface measurements typically involves multiple instruments deployed with separations of several kilometers to achieve useful spatial coverage.
A number of impediments must be overcome in designing a system for real-time measurement and delivery of data from multiple subsurface instruments distributed across large areas of the coastal ocean. There are strong tidal currents, severe winds, mobile sediments, heavy commercial shipping and fishing activities, rapid biofouling, and recreational traffic that increases the likelihood of equipment tampering and pilfering. Seafloor wires and cables are incompatible with bottom-fishing activities in most coastal areas. Acoustic modems present an attractive wireless alternative that is gaining favor as the technology matures. An example of their use is one-way data transfers from instruments directly to surface buoys near each instrument that relay data to shore stations [1].
An array of networked acoustic modems is a new approach to real-time data delivery from multiple sparsely distributed subsurface instruments. Telesonar technology, a general term for acoustic telemetry and ranging, is being pursued by the Navy for undersea surveillance and enables the system [2]. The University of Connecticut, the Navy, and Benthos, Inc are collaborating on this application as part of the "Front-Resolving Observation Network with Telemetry" (FRONT) project (http://nopp.uconn.edu) funded by the National Oceanographic Partnership Program (NOPP).
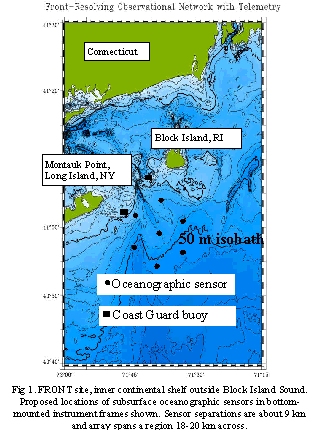
The FRONT site is the inner continental shelf outside Block Island Sound (Fig 1), a region with complex bathymetry, strong tidal currents, and buoyant estuarine outflows. Evidence for an oceanic front oriented roughly along the 50-m isobath in satellite sea surface temperatures [3] has in part motivated the array design, which includes instrument separations of about 9 km and spatial coverage over an area 18-20 km across. These needs are typical of requirements to resolve and study processes in most coastal zones.
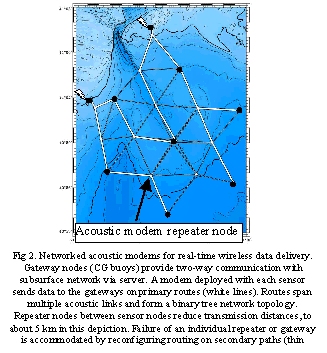
Use of networked telesonar modems as a real-time data delivery system involves modems deployed in conjunction with three types of network nodes (Fig 2). Gateway nodes are surface buoys serving as the interface between the subsurface network and the shore. Repeater nodes are individual acoustic modems serving only to relay messages. Sensor nodes are oceanographic instruments connected serially to a telesonar modem to transmit data through the network at regular intervals. Sensor node modems can also relay data.
Networked modems offer a number of advantages for this application. Use of repeater nodes facilitates sparse sensor placements (Fig 2). Repeaters also enable multiple data routes to shore from each sensor. Two-way communication between the shore and the subsurface network facilitates reconfiguration of data routing, enabling the network to accommodate loss or failure of an individual repeater by changing to secondary routes. Multiple gateway nodes mean the reconfiguration capability applies to failure of a gateway. Two-way communication also makes adaptive sampling possible. The network is expandable and with additional repeaters allows sensors to be placed at increasing distances from the gateway. Each gateway serves multiple instruments so the number of system components subject to the problematic sea surface environment is minimized. Sensors can be deployed in bottom frames designed to protect against fishing gear impacts. For FRONT, about ten sensors will be served by some ten or twelve repeaters and two gateways.
This article focuses on several key components of the real-time system: a bottom-mounted frame to protect oceanographic sensors and enable acoustic communications; gateway data control and bandwidth issues; gateway implementation on a Coast Guard buoy; range capability of acoustic modems and its dependence on environmental conditions; and a preliminary demonstration of modem networking features.
II. Bottom-mounted instrument frames
To facilitate the system for real-time data delivery using networked acoustic modems in heavily fished coastal waters, bottom-mounted instrument frames housing oceanographic sensors need to satisfy two primary design constraints. They must permit azimuthally omnidirectional acoustic communications and protect sensors against potential impacts of trawling gear. In this section we describe a new frame designed to achieve these objectives with straightforward deployment and recovery operations.
Minimizing damage to oceanographic and fishing equipment is a concern in most coastal areas. The approach taken here is two-fold. First, efforts are made to establish interactive communication between scientists and the fishing industry. Scientists learn the prevalent types of fishing equipment and techniques, and the most actively fished times of year if seasonal. Fishers are informed that oceanographic equipment is planned for deployment and are encouraged to suggest potential sites for instruments near known boulder or wreck areas they avoid. A survey distributed to fishers in New York, Connecticut, and Rhode Island (http://nopp.uconn.edu/-announce5.html) has yielded valuable information to guide instrument design and placement. Regular announcements of deployment locations are made in the Local Notice to Mariners published by the Coast Guard.
In addition to dialog with the fishing community, efforts to limit damage to sensors and to fishing gear center on designing an instrument frame that deflects trawling gear on impact. This requires all components to be housed beneath the structural members of a low-profile pyramidal frame. Based on similar designs (e.g. [4]) including those that incorporate results of trawling tests, the face angle of the package is held to no more than about 30 degrees above horizontal.
Azimuthally omnidirectional acoustic signaling from the frame is critical for functioning of the acoustic modem network. This is necessary to send data along multiple bearings associated with various routes configurable from shore without requiring adjustment to the deployed instruments. It also eliminates the need for precise orientation of bottom frames during deployment, an important practical consideration.
The combined needs for a low profile together with azimuthally omnidirectional acoustics impose a stringent geometrical constraint on the frame design. The modem transceiver must be placed at the apex of the pyramidal frame and all other components must be arranged beneath its lower plane in order that they do not obstruct its signaling (Fig 3A).
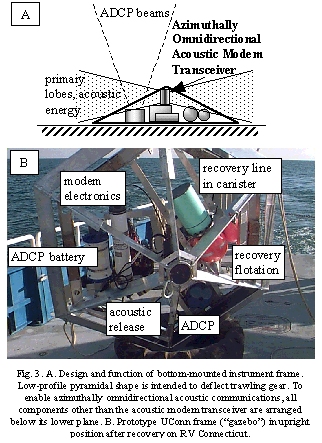
As seen in the prototype (Fig 3B), the frame houses three primary functional modules: the oceanographic sensor or sensors, the acoustic modem, and the recovery package. The frame is approximately 71 cm high and 228 cm in diameter. To date acoustic Doppler current profilers (ADCPs) have been incorporated; there is space for additional sensors. Selection of the shortened pressure-housing model ADCP with an external battery pack permits its placement below the lower plane of the modem transceiver. A remote-transceiver model of acoustic modem is used for maximum hardware configuration flexibility. The azimuthally omnidirectional line-array transceiver is used for its potential to achieve greater horizontal range, due to its 2-3dB directivity gain in the horizontal plane over a spherically omnidirectional model.
To deploy a sensor node the frame is lowered using a heavy-duty acoustic release. The frame has no bottom surface to minimize kiting during lowering. On deployment, the acoustic modem communicates the frame pitch and roll angles as measured by the ADCP. An instrument deployed at an unacceptable angle can quickly be re-deployed. Remote confirmation of orientation angles during deployment also elimiates the need to gimbal tilt-sensitive components. Recovery is by pop-up float, activated by a lightweight acoustic release on the frame. On rising, the float pulls a lifting line from a packed canister permitting diver-free retrieval of the package.
Panels covering the frame in an early design are now omitted based on new knowledge of high sediment mobility at the site. In the initial design, sheets of ultra-high molecular weight plastic with minimal acoustic impedance were secured across all faces of the frame to improve trawl resistance. At the end of an early deployment, a failed acoustic release required use of a remotely-operated vehicle for recovery, which was carried out by the North Atlantic and Great Lakes office of the National Undersea Research Center at University of Connecticut. Video images of the frame after several weeks on site revealed sediments were being trapped inside the plastic panels and had largely filled the pyramidal volume. We suspect strong tidal currents re-suspend sedimentary materials, but very little is known about the bottom environment at this site. Accordingly we omit panels from our design, sacrificing some trawl resistance but limiting sediment build-up. A frame design incorporating a solid syntactic foam base could enable protective faces for the frame while also keeping sediments from filling it. However, it is not clear such a design could ensure the foam does not degrade acoustic modem performance.
III. Gateway functionality
Gateway nodes play a critical role in the real-time system as the interface between users and the subsurface acoustic modem network. They are choke points for both measurement data delivery to users and two-way flow of network and sensor control information. In this section we discuss the role of the server that connects to the gateway and relevant data management issues. We also describe the engineering effort to equip a Coast Guard navigation buoy as a functioning gateway.
A. Network server: Role, portability
-
A gateway node consists of a cellular modem interfaced by serial cable to an acoustic modem and positioned on a surface buoy. We use cellular modems because they require no line-of-sight onshore station. The cellular service is available for an economical monthly rate based on the amount of data transmitted. A 19.2 k cellular digital packet data (CDPD) link to the cellular modem, at its uniquely assigned IP address, is established via the internet by the network server which typically resides on shore.
The server is the heart of the real-time system and plays three important roles: sending and receiving network command and control information, archiving sensor data as it is collected, and providing users access to real-time and archived data via the internet. For simplicity and modularity these three tasks are implemented using a single software package.
Modular server software enables server control to pass between two different physical locations provided each has the same software and can connect to the internet. For example, during a deployment cruise server control resided on the RV Connecticut, with the connection to the internet via a second cellular modem. On return to port, a shore server took over control. Another example of exchanging server control between different physical servers is planned for Seaweb 2000, an experiment to demonstrate real-time data delivery by networked telesonar modems in Buzzards Bay, MA. A server in Providence, RI at the Oceans 2000 conference will take over control of the network from the server at Benthos on Cape Cod in order to demonstrate real-time network capabilities for meeting participants.
B. Low-bandwidth sensor data formats
-
As the bottleneck for data transmissions, the gateway highlights the need for efficient low-bandwidth data formats for oceanographic sensors. A high premium is placed on efficiency of data transmitted through the acoustic network to limit power consumption so deployment duration can be extended. There is also a constraint in interim modem software versions that 255 bytes is the maximum size of a single acoustic transmission.
Modifications to data formats output by sensors are necessitated in some cases. For example, standard ADCP outputs include full deployment configuration information in a header, together with complete diagnostic performance information, as part of every data ensemble collected. The 255-byte limit is quickly exceeded for even modest sampling goals. A new ADCP firmware version with a modified low-bandwidth data format for real-time serial output has been designed. The modification affects only data sent out the serial port; full original-format data for post-recovery analysis are stored on board. The real-time system first receives instrument configuration information as one packet, without velocity data, at the start of the deployment. The server stores these parameter values. Then for the remainder of the deployment user-selectable subsets of the full data stream, for example every second bin of just the two horizontal velocity components, are sent as packets containing data values with very minimal header information. If sampling parameters are changed adaptively from shore, a new set of configuration parameters is sent and its values stored by the server, followed by the stream of more efficient minimal-header data packets.
C. Coast Guard buoy gateway
-
Gateway buoys form a vital link between shore and the subsurface network. They are also the only component of the real-time system subject to the harsh environment of the air-sea interface.
Our approach is to use "buoys of opportunity" in the form of U.S. Coast Guard (CG) navigation buoys. This has the advantage that the CG maintenance effort is leveraged. It also has the disadvantage that a limited number of gateway locations are available that may not necessarily be positioned to support sampling goals. This lack of flexibility is ameliorated to some degree by expandability of the subsurface network, for which additional repeaters enable placement of sensors at increasing distances from the gateway buoy.
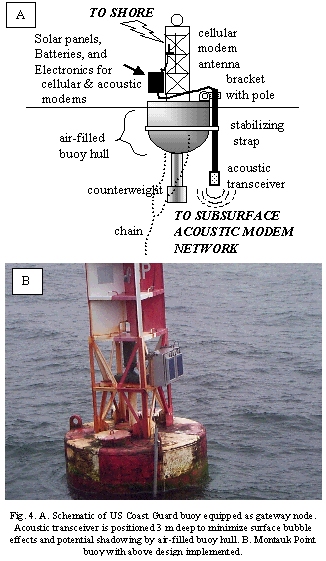
A means of equipping a CG buoy with the requisite hardware elements has been devised and implemented in consultation with CG colleagues (Fig 4A). The most important feature is that the acoustic modem transceiver is positioned as deep as possible. This is required to minimize acoustic absorption and scattering by bubbles associated with breaking surface waves, and to limit the shadowing influence of the air-filled buoy hull. A spherically omnidirectional acoustic transceiver is mounted at the end of a pole that is bracketed to a bail on the hull platform and stabilized with a strap around the buoy hull. The depth of the transceiver is 3 m, the maximum possible as limited by the need to avoid contact with the buoy chain bridle. This arrangement is in place on the 9-ft diameter, 35-foot length Montauk Point CG buoy (Fig 4B). A weatherproof stainless box contains serially interfaced cellular and acoustic modem electronics powered by gelcell batteries and recharged by solar panels. The cellular modem antenna is positioned high on the buoy cage.
Performance of this gateway has been reliable through two test deployments of in-water network components. The cellular connection is >99% error-free. The gateway acoustic link is favored by placing the first repeater modem on the seafloor within direct-path range, in this case a few 100 m from the buoy. Continuing tests of the sensitivity of the acoustic link to buoy motions and wind and wave conditions are underway. Should reliability of the acoustic link from this platform prove inadequate for long-term use, the option of deploying and maintaining small lightweight gateway buoys will be pursued.
IV Acoustic modem performance
A. Range and dependence on environmental conditions
-
The viable communications range of telesonar modems determines inter-node spacing of repeater nodes in the network. This must be maximized to reduce the number of repeaters required for a given network area coverage. However, modem range can be strongly dependent on environmental conditions such as winds, tidal currents, and sound speed profile variations. In this section we report results of two field tests examining modem range and sensitivity to environmental conditions in winter and spring conditions.
The same important and interesting variable oceanic processes that motivate use of real-time measurement systems at the FRONT site also cause the acoustic channel to be an extremely challenging signaling environment [5]. There are strong sound-speed gradients vertically and horizontally, in addition to rapid temporal fluctuations, and ducting within the shallow water column is not prevalent. Modem communications at ranges of a few km or more in 50-100 m water depths necessarily involve multiple interactions of sound energy with the sea surface and seafloor boundaries. Noise levels are high in part due to anthropogenic activities.
The telesonar modems in this project are the Benthos (previously Datasonics) 87x/88x series operating at 9-14 kHz. Signaling applies Hadamard encoding at 300 bps [6,7] as has improved considerably in the last several years [8,9]. Packet sizes are nominally 255 bytes. Repeater modems have spherically omnidirectional transducers and are deployed as an in-line mooring with the modem 2-3 m above the bottom. This is in part motivated by the expectation of downward-refracting sound speed profiles (SSPs) favoring bottom placement. With use of acoustic releases to enable recovery, no surface signature of the mooring is needed so biofouling and mooring wear is minimized. High-flyer radar reflectors are set as surface markers to signal the instruments to fishers.
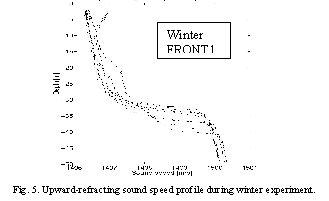
1.) Winter conditions. The first experiment (FRONT1, December 5-13, 1999) was during winter. A linear array of four receiving modems was deployed at 0.5 km intervals between two source modems in bottom-mounted frames 2.5 km apart that alternately transmitted ADCP data packets each 15 minutes for about 8 days. The site was about 50 m deep near the center of the proposed network (Fig 1). SSPs showed upward-refracting conditions (Fig 5). Increasing salinity with depth, likely associated with estuarine influences near the surface, stabilized density profiles to offset the temperature-destabilized structure associated with wintertime surface cooling (not shown).
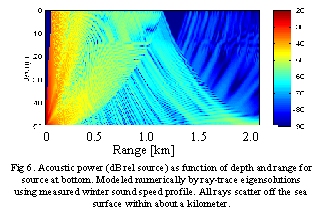
Ray-trace modeling using measured SSPs demonstrates upward refraction, indicating eigenrays reflect off the sea surface within about 1 km or less of a source near the bottom (Fig 6). The implication is that range is reduced by scattering at the highly variable sea surface boundary.
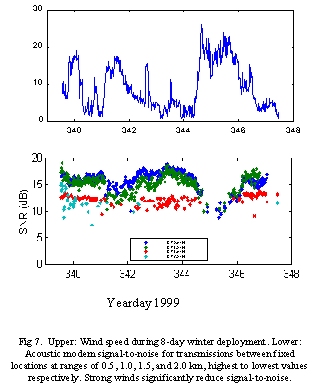
Time series data (Fig 7) give a clear indication that winds influenced modem range in this upward-refracting environment. Increased winds reduce the signal-to-noise (SNR) ratio. Wind can affect the channel in at least two ways: by causing mixing that modifies the SSP, and by roughening the sea surface. Reduced SNR is seen instantaneously with increased winds, though SSP changes due to wind mixing are generally thought to occur with some delay following extended winds. We conclude that range reduction due to winds occurs by roughening of the sea surface.
2.) Spring conditions. The second experiment (ForeFRONT2, April 20-28, 2000) was during spring. An array similar to that in the winter experiment but with nominal 1-km node separations extended offshore from the Montauk Point buoy in water depths from about 25 to 45 m.
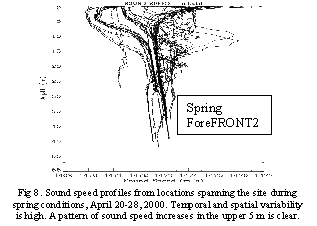
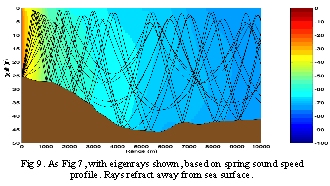
SSPs were highly variable but showed a persistent sound speed increase in the shallowest 5 m (Fig 8), probably associated with cold fresh surface outflow from nearby estuarine systems. Accordingly, in ray trace modeling some refraction away from the surface boundary is seen (Fig 9) suggesting power loss with increasing range should be less rapid than for winter conditions. However, time series data compared to winds (not shown) indicate substantial SNR reduction during strong winds in nearly identical fashion to the wintertime observations. Apparently enough energy interacts with the boundary to degrade signals despite some refraction away from it.
Tidal currents in shallow coastal areas are vigorous and can cause vertical mixing that modifies the SSP. However, we find no evidence for modem performance fluctuations on tidal timescales in either winter (Fig 7) or spring.
A compilation showing the percent of successful transmissions at various ranges during the 8-day spring experiment (Fig 10) indicates 50% success at a range between 2 and 3 km. It is important to note that the absolute percentage is largely controlled by the winds during this 8-day interval; if winds were high for all 8 days the percent of successes would be reduced at all ranges.
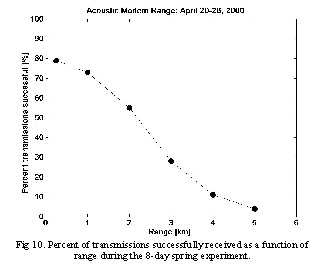
3.) Conclusions, implications for network. To summarize, modem communications range is reduced as wind speed increases and roughens the sea-surface. This applies during both upward-refracting winter conditions and also when there is some downward refraction away from the surface in spring. No impact of tidal fluctuations on acoustic performance is detected. During an 8-day spring experiment 50% of transmissions were successfully received at range 2-3 km.
Choice of repeater node separation distances when designing the network embodies a trade-off between reliability and spatial coverage. Tests to date indicate 5-km node separations as proposed (Fig 2) are unlikely to provide adequate reliability at the FRONT site. Based on the short springtime experiment, for roughly 50% successful transmissions a 2- to 3-km repeater spacing appears reasonable. This may improve when advanced Seaweb functions now under development for packet acknowledgement and automatic repeat requests are incorporated in telesonar modem software.
Reliability of 50% may seem poor, but it must be considered in light of how the data will be used. It can be argued that introducing updated observations each two hours instead of hourly to data-assimilative numerical modeling of coastal circulation will not be a severe limitation.
For the network to obtain broad spatial sampling in two dimensions (Fig 1) with reduced node spacing corresponding to the 2- to 3-km range capability will require a large increase in the number of repeaters. A feasible alternative to this costly choice is to reconfigure the array using the same sensors and roughly the same number of repeaters as shown in Fig 2. With 2- to 3-km repeater spacing the across-isobath span of the network can be maintained as long as spatial coverage in the along-shore dimension is reduced to about 5 km. This would enable coverage to 18-20 km offshore from the gateways, permitting resolution of oceanic frontal activity along the 50-m isobath.
B. Preliminary network demonstration: June, 2000
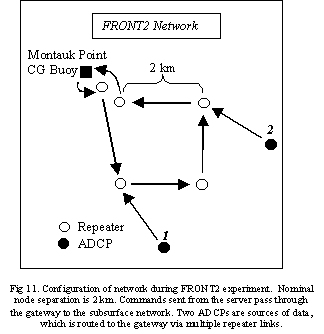
A number of important networking capabilities were demonstrated and tested in a recent experiment (FRONT2) involving a small subset of the array proposed in Figs 1 & 2. Instruments were positioned in an array (Fig 11) leading offshore from the Montauk Point CG buoy gateway with 2 km node separations based on the above analysis. Two ADCPs in bottom frames were data sources transmitting alternately at 15-minute intervals and five repeater modems served to relay messages to and from the gateway along the routes shown in Fig 11. The experiment lasted 3-4 days, with calm weather conditions initially and strong winds and rough sea state during the last 2 days.
Messages were sent successfully from the gateway along a route including all five repeaters that terminated back at the gateway. The server was on board the research vessel during the deployment and used a cellular modem to connect to the internet and access the gateway cellular modem. Individual nodes were also reconfigured by direct acoustic links from the vessel using a deck unit modem with dunking transceiver.
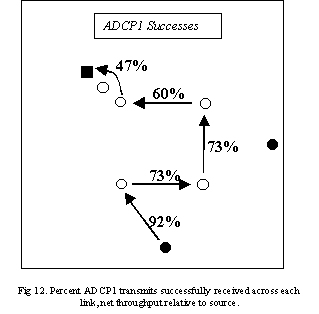
Reliability of data relay from source ADCP1 across the five acoustic links in its route resulted in 47% net throughput to the gateway and on to shore (Fig 12). Each link is marked with a net throughput percentage indicating successful data receptions across that link relative to the total number of packets sent out from the source. The net percent success for data arriving at the gateway and therefore on shore is clearly reduced in proportion to the number of acoustic transfers. The relatively high success rates along this route are associated with the calm winds and mild seas that prevailed when it was active.
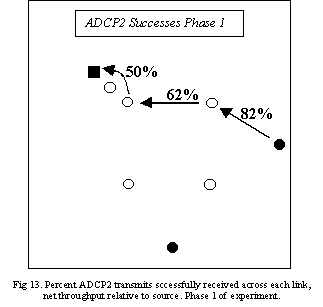
Data from the other source ADCP2 was routed across three acoustic links (Fig 13) during Phase 1 of the experiment, roughly corresponding to the same time that ADCP1 was active. It had slightly higher throughput than ADCP1, as expected for a route including two fewer acoustic links.
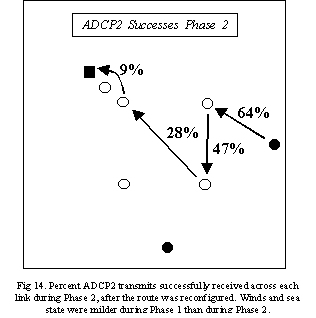
To demonstrate the reconfigurable nature of the network, the routing for ADCP2 was changed (Fig 14) by remote commands issued at the server mid-way through the experiment to begin Phase 2. Successes along the reconfigured route were less reliable, due primarily to the more severe winds during Phase 2. The longer range of the third link, diagonal across the square formed by the repeaters, also may have contributed to the reduced success level.
In summary, the experiment demonstrated relaying of data and control commands across multiple acoustic links, server control of the network from aboard the vessel with later transfer to an onshore server, use of control commands from the gateway, and route reconfiguration. Link performance statistics were obtained and are being used to identify weaknesses in the modem implementation.
V. Summary and conclusions
A network of telesonar modems is presented as a new means for real-time wireless delivery of subsurface measurements from multiple sparsely distributed instruments in the coastal ocean. The system is being developed by UConn, the Navy, and Benthos as part of the NOPP-funded FRONT project sited on the inner continental shelf outside Block Island Sound. System advantages include two-way communication between the subsurface network and a server that can be located on shore or on a research vessel, multiple reconfigurable routes for data to reach shore from each sensor, a minimal number of instruments exposed to the problematic sea surface environment, tolerance of individual network node failures, and adaptive sampling. A new bottom-mounted instrument frame design protects oceanographic sensors from trawling impacts and facilitates azimuthally omnidirectional acoustic signaling as required for network operation. Efficient formats for sensor data are motivated by the need to minimize network power consumption, and a low-bandwidth format has been developed for ADCPs that enables configuration parameters and subsets of velocity data to be delivered independently. Gateway nodes consist of cellular modems serially interfaced to acoustic modems; engineering to equip the Coast Guard buoy that has served in field work to date has been presented. Analysis of winter and spring deployments of acoustic modem arrays to assess range capabilities indicate performance is sensitive to wind speed, which degrades SNR by roughening the sea surface. For the present generation of telesonar hardware and software, acoustic links at the FRONT site are adequately reliable at ranges of 2-3 km, which may necessitate redesign of the proposed array that was based on 5 km range. A preliminary small-scale deployment of an array of instruments and networked modems has demonstrated transmissions across multiple acoustic links, network control through the gateway, transfer of control from a server on the vessel to a server on shore, and route reconfiguration.
Acknowledgments
To develop a new system on this scale involves dedicated efforts of many. Thanks are in order for D. Arbige, I. Babb, L. Burch, J. Bean, D. Cohen, S. Colin, R. DeGoursey, R. Dziomba, J. Godfrey, G. Grenier, A. Houk, D. Rogers, M. Slaney, N. Worobey, and Captain T. Cabaniss and the RV Connecticut crew, from UConn; P. Baxley, B. Creber, C. Fletcher, and V. McDonald from SSC-SD; M. Porter from SAIC; J. Baker, J. Hardiman, D. Porta, and K. Scussel from Benthos; and CWO D. Tribou from USCG. This project is sponsored by the National Ocean Partnership Program (Office of Naval Research Award Number: N00014-99-1-1020), an innovative collaboration of twelve federal agencies whose mission is to promote cooperative activities among the government, academia, industry, and other organizations for the advancement of ocean science, technology, and education. Cost-sharing for involvement of U.S. Navy personnel was provided by ONR 321SS and by the Space and Naval Warfare Systems Center, San Diego Seaweb Initiative.
References
[2] M. D. Green, J. A. Rice, and S. Merriam, "Implementing an undersea wireless network using COTS acoustic modems," Proc. MTS Ocean Community Conf. Vol.2, pp. 1027-1031, Baltimore, MD, November 1998.
[3] D. Ullman and P. Cornillon, "Satellite-derived sea surface temperature fronts on the continental shelf off the northeast U.S. coast," J. Geophys. Res. Vol.104, pp. 23,459-23,478, 1999.
[4] J. Dessureault, D. J. Belliveau, and S. W. Young, "Design and testing of a trawl-resistant package for an acoustic Doppler Current Profiler," J. Oceanic Eng. OE-16, 397-401, 1991.
[5] J.A. Rice, "Acoustic signal dispersion and distortion by shallow undersea transmission channels," Proc. NATO SACLANT Undersea Research Centre Conf. on High-Freq. Acoust. on Shallow Water, Lerici, Italy, pp. 435-442, July 1997.
[6] K. E. Scussel, J. A. Rice, and S. Merriam, "A new MFSK acoustic modem for operation in adverse underwater channels", Proc. IEEE Oceans’97 Conf., Halifax, Nova Scotia, Canada, Vol.1, pp. 247-254, October 1997.
[7] M. D. Green, J. A. Rice, and S. Merriam, "Underwater acoustic modem configured for use in a local area network," Proc. IEEE Oceans’98 Conf., Vol.2, pp. 634-638, Nice, France, September 1998.
[8] J. A. Rice, V. K. MacDonald, M. D. Green, and D. Porta, "Adaptive modulation for undersea acoustic telemetry," Sea Technology, Vol. 40, No. 5, pp. 29-36, May 1999.
[9] M. D. Green, "New innovations in underwater acoustic communications," Proc. Oceanology International, Brighton, U.K., March 2000.